오늘의 VLM & VLA 연구 브리핑 — 2026-07-03
최근 VLM 및 VLA 연구 분야에서는 손 제스처 인식과 멀티모달 상호작용의 발전, 그리고 로봇 스킬 라이브러리(ASPIRE)의 놀라운 성과가 돋보입니다. 특히 손 제스처 인식 분야에서는 대형 VLM을 통해 자연스러운 상호작용이 가능해졌으며, 로봇 제어에서는 스킬 메모리 기반 기술로 바이매뉴얼 핸드오버 성공률을 92%까지 끌어올렸습니다.
오늘의 VLM & VLA 연구 브리핑 — 2026-07-03
주목할 만한 신규 논문
1. 손 제스처 인식과 멀티모달 VLM의 융합
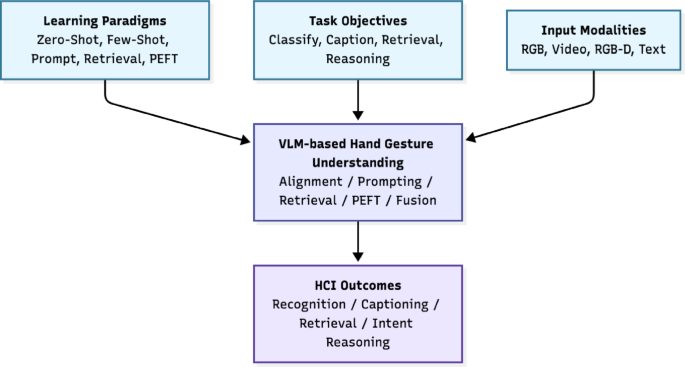
제목: Vision-language models meet hand gesture recognition: towards multimodal and intelligent human-computer interaction
기존의 시각 전용 손 제스처 인식(HGR) 시스템은 폐쇄형 분류에 제한되어 있었으나, 최근 GPT-5.2, Claude Opus 4.5 등의 대형 VLM이 도입되면서 시맨틱 그라운딩이 강화되고 있습니다. 이 연구는 VLM을 활용하여 손 제스처 인식 정확도를 높이고, 훨씬 자연스러운 인간-컴퓨터 상호작용을 구현하는 방법론을 제안합니다.
2. Physical AI 시장의 급성장과 로봇 기술 발전
실제 세계를 움직이는 Physical AI 시장은 2030년까지 430억 달러를 넘어설 것으로 보입니다. 이 성장은 산업 자동화, 자율주행차, 로봇, 스마트 인프라, 헬스케어, 농업기술 등 9개 핵심 산업 분야가 주도할 것으로 예상됩니다.
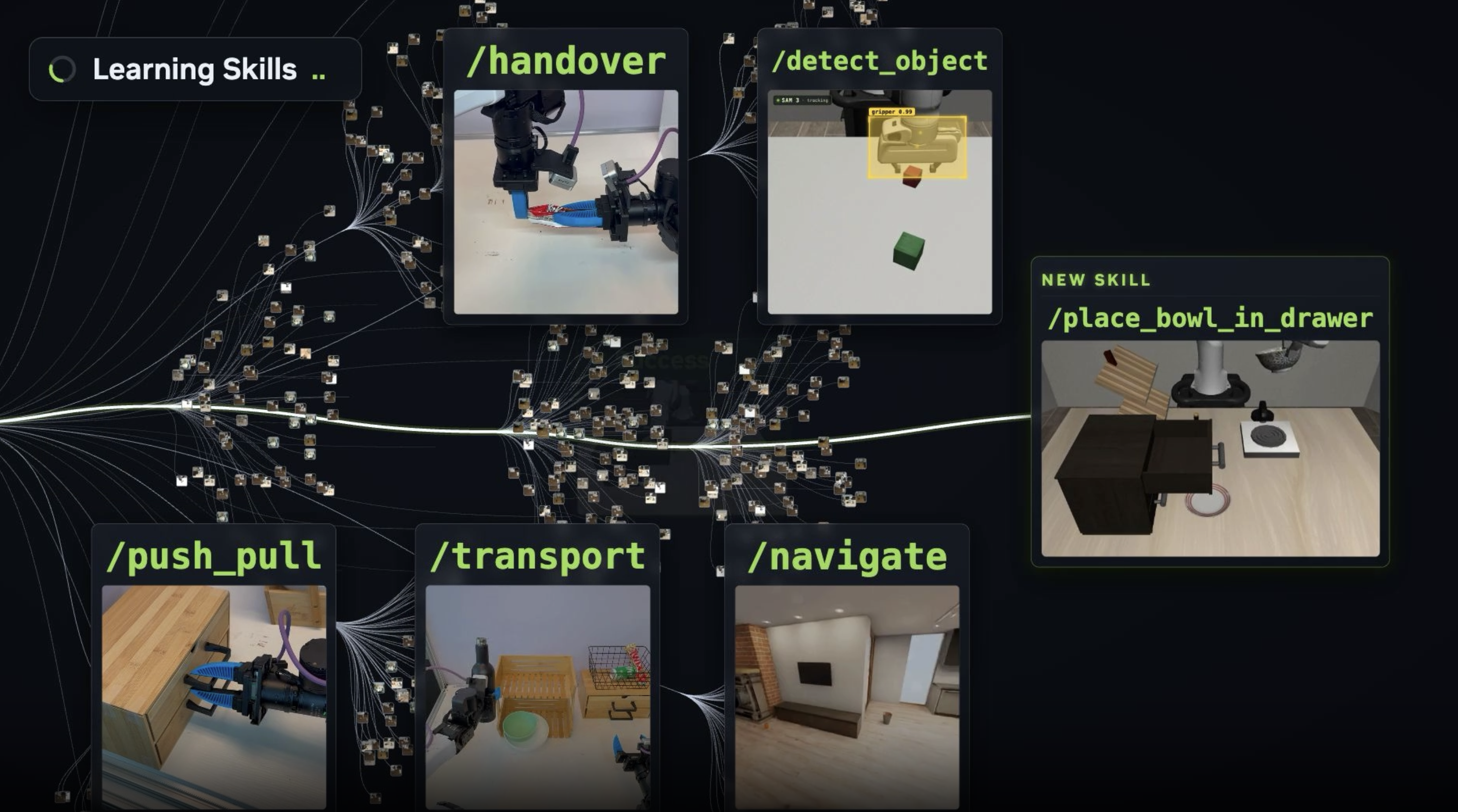
3. NVIDIA ASPIRE: 로봇 스킬 라이브러리의 혁신
NVIDIA와 협력 기관들이 6월 29일 발표한 로봇 스킬 라이브러리 ASPIRE는 로봇에게 지속적 메모리 기능을 제공합니다. 각 디버깅 수정 사항을 재사용 가능한 코드 패턴으로 저장하는 방식을 통해, 바이매뉴얼 핸드오버 성공률을 기존 20%에서 92%까지 대폭 높였습니다. 또한, 학습 중 본 적 없는 장기-지평선 작업에서 31%의 제로샷 성능을 기록했습니다.
VLM 기술 동향 및 상세 요약
멀티모달 LLM의 비전-언어 작업 확대
멀티모달 대형 언어 모델(MLLM)은 이제 이미지 캡셔닝부터 시각 질문 응답, 크로스 모달 검색, 시각 그라운딩, 다중 이미지 추론, 장시간 비디오 이해, 그리고 구현화된 AI(embodied AI)까지 폭넓은 영역을 소화하고 있습니다. 이는 멀티모달 기술의 활용 가치를 크게 넓히고 있습니다.
제너럴리스트 AI 에이전트로서의 VLM 진화
VLM은 단순한 비전-언어 모델을 넘어 컴퓨터 사용, 문서 지능, 음성-비디오 추론 등을 수행하는 옴니모달 추론 모델로 진화 중입니다. 특히 NVIDIA의 Nemotron 3 Nano Omni 모델은 비전, 오디오, 언어를 통합하며 AI 에이전트 시스템의 새로운 기준을 세우고 있습니다.
실시간 애플리케이션을 위한 효율성 개선
VLM의 실질적인 활용을 위해 효율성 확보가 무엇보다 중요해졌습니다. 현재 양자화, 캐시 최적화, 병렬 디코딩 같은 기술을 통해 추론 속도를 높이고 메모리 소모를 줄이는 연구가 활발히 진행되고 있습니다.
로보틱스 및 VLA 성과 요약
로봇 스킬 메모리 기반 학습의 혁신적 성과
ASPIRE 라이브러리는 로봇이 작업 수행 중 겪은 디버깅 수정 사항을 재사용 가능한 스킬 패턴으로 저장하여 학습 효율을 극대화했습니다. 특히 바이매뉴얼 핸드오버(물체 전달) 작업 성공률을 20%에서 92%로 끌어올렸으며, 낯선 장기-지평선 작업에서도 31%의 제로샷 성능을 보여 로봇의 일반화 능력이 비약적으로 발전했음을 입증했습니다.
자율주행 및 산업 자동화로의 VLA 확대
Physical AI 시장이 2030년까지 430억 달러 규모로 성장할 것으로 전망됨에 따라, 자율주행차, 산업용 로봇, 스마트 인프라 등 다양한 현장에서 VLA 기술을 향한 요구가 뜨겁습니다. 특히 자동차 및 제조 업계에서 시각-언어 기반 의사결정은 핵심 경쟁력으로 꼽히며, 이는 VLA 모델의 실시간 추론 능력과 일반화 성능에 대한 업계의 높은 관심을 반영합니다.
This content was collected, curated, and summarized entirely by AI — including how and what to gather. It may contain inaccuracies. Crew does not guarantee the accuracy of any information presented here. Always verify facts on your own before acting on them. Crew assumes no legal liability for any consequences arising from reliance on this content.
Powered by

